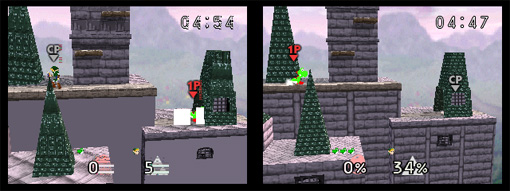
StrmnNrmn has posted a trio of R12 progress updates up on his blog. I won't bore you with the technical details, so to sum it all up, StrmnNrmn says he has squashed various texture bugs, resulting in improved graphics for games like Super Smash Bros. See for yourself here.. R11 is (obviously) shown on the left screen, while the shot of R12 is on the right:
Not bad, eh? That's not all, he is also pondering some ways to get Goldeneye up and running. Though he notes that Goldeneye isn't an immediate priority, it's still nice to know he's thinking about it.
Update: New update on StrmnNrmn's blog! N64 classic Goldeneye is now up and running on Daedalus R12. There's a few graphical glitches, but at least the game is booting now. Check out the screens here.
Update 2: Super Smash Bros. is now running at 30-40 FPS with the newly implemented dynarec!
More at his official blog here.
Not bad, eh? That's not all, he is also pondering some ways to get Goldeneye up and running. Though he notes that Goldeneye isn't an immediate priority, it's still nice to know he's thinking about it.
Update: New update on StrmnNrmn's blog! N64 classic Goldeneye is now up and running on Daedalus R12. There's a few graphical glitches, but at least the game is booting now. Check out the screens here.
Update 2: Super Smash Bros. is now running at 30-40 FPS with the newly implemented dynarec!
More at his official blog here.





